Fully teleoperated peripheral endovascular interventions with a novel robotic system: a first-in-human study
Selected in JACC: Cardiovascular Interventions by Lubin Alonzo
Endovascular robotics has emerged as a promising strategy to reduce occupational radiation exposure and expand access to complex vascular interventions.
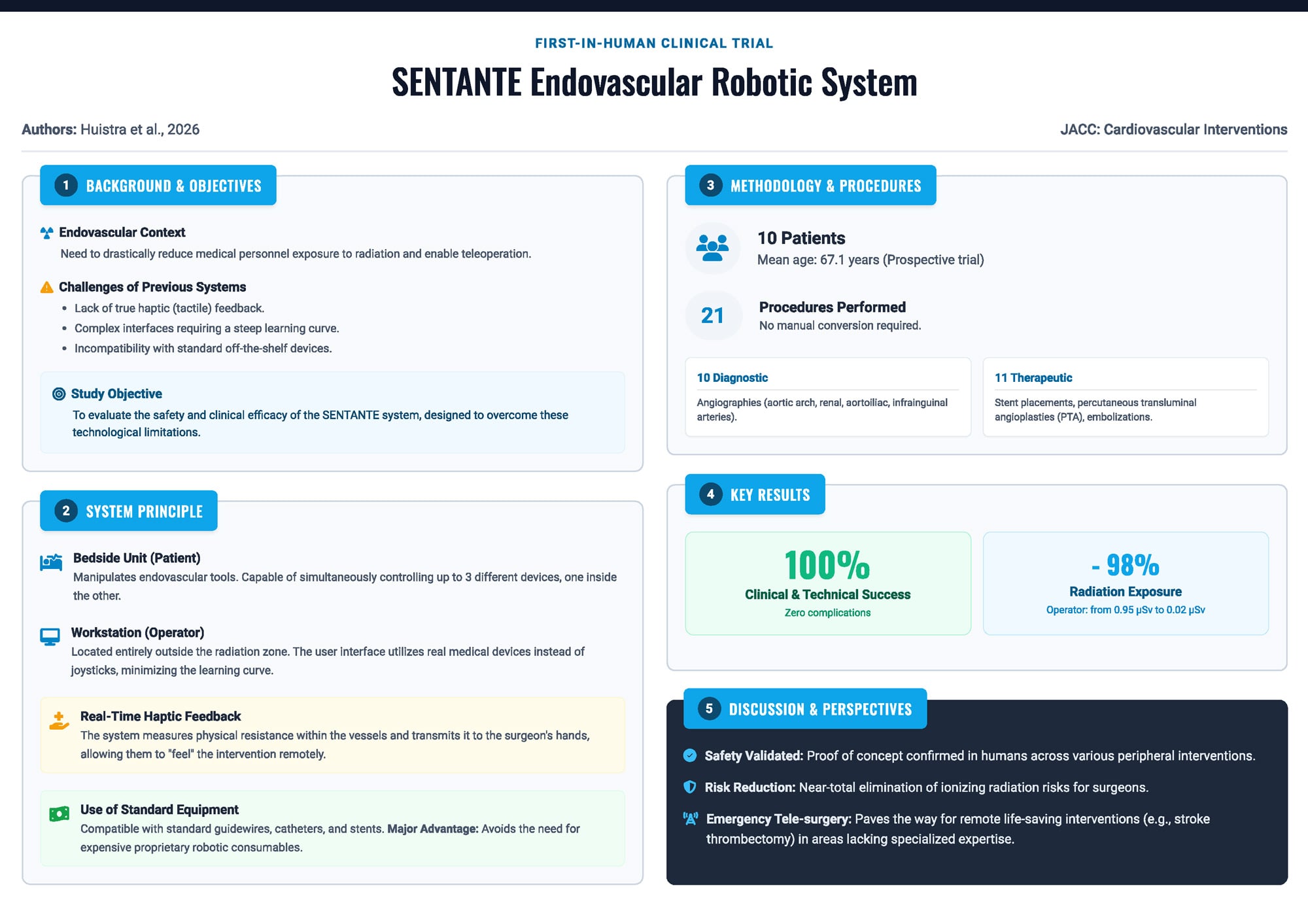
In this first-in-human study, Huistra et al. evaluated the safety and feasibility of the SENTANTE robotic system, a novel teleoperated endovascular platform providing real-time haptic feedback and full compatibility with standard endovascular devices.
The study assessed the performance of the system across a range of diagnostic and therapeutic peripheral endovascular procedures.
References:
Authors: Emiel W.M. Huistra, Tomas Baltrunas, Helmuts Kidikas, Giovanni Federico Torsello, Konstantinos Stavroulakis, Lorenzo Patrone, Vaidas Labunskas, Vilius Dambrauskas, Clark J. Zeebregts, and Dainis Krievins
Reference: JACC: Cardiovascular Interventions Volume 19, Number 8 - 27 April 2026
DOI: 10.1016/j.jcin.2025.12.021
Read the abstractObjective:
To evaluate the safety, feasibility, and efficacy of fully teleoperated peripheral endovascular interventions performed using the SENTANTE robotic system, a next-generation robotic platform incorporating haptic feedback and compatibility with commercially available endovascular devices.
Study:
- Prospective, single-center, first-in-human clinical trial
- Conducted between July and October 2024
- Evaluation of the SENTANTE teleoperated endovascular robotic system
- Included both diagnostic and therapeutic peripheral endovascular procedures
- Fully remote manipulation of guidewires, catheters, balloons, stents, plugs, and coils
- Real-time haptic feedback available to the operator
Population:
- 10 patients
- Mean age: 67.1 ± 10.9 years
- 3 women
- Total of 21 procedures:
- 10 diagnostic procedures
- 11 therapeutic procedures
- Procedures involved aortoiliac, infrainguinal, renal, and aortic arch vascular territories
- Therapeutic interventions included iliac stenting, femoropopliteal angioplasty, tibioperoneal angioplasty, and embolisation.
Endpoints:
Primary endpoints
- Technical success
- Procedural success
- Clinical success
- Requirement for manual assistance or conversion to conventional intervention
- Occurrence of procedure-related adverse events.
Secondary assessments
- Procedural time
- Fluoroscopy time
- Contrast volume
- Patient radiation exposure
- Operator radiation exposure.
Outcomes:
- Technical success: 100%
- Procedural success: 100%
- Clinical success: 100%
- No adverse events reported
- No manual assistance or conversion required
- All planned diagnostic and therapeutic procedures were completed robotically
Radiation exposure to the operator was reduced from an average of 0.95 ± 0.68 μSv to 0.02 ± 0.04 μSv, representing a near-complete elimination of occupational radiation exposure.
The robotic system successfully enabled remote guidewire manipulation, balloon angioplasty, stent deployment, embolisation, and device retrieval while maintaining full control through haptic feedback.

Get the latest clinical cases and breaking news delivered straight to your inbox!

Conclusion:
This first-in-human experience demonstrates that fully teleoperated peripheral endovascular interventions using the SENTANTE robotic system are feasible, safe, and effective. The platform achieved excellent procedural outcomes while dramatically reducing operator radiation exposure.
The ability to remotely manipulate standard endovascular devices with real-time haptic feedback represents an important technological advance that may facilitate future remote vascular interventions and improve access to specialised care. Larger studies are required to validate these findings and assess performance across broader clinical settings.
Discussion
The SENTANTE study represents a significant step forward in the evolution of endovascular robotics. Unlike previous robotic systems, which often relied on proprietary devices and offered limited tactile feedback, SENTANTE is compatible with standard commercially available wires, sheaths, balloons, stents, plugs, and coils. This compatibility may lower adoption barriers and reduce procedural costs.
Another key innovation is the integration of real-time haptic feedback, allowing operators to perceive device-vessel interaction remotely. This feature addresses one of the major limitations of earlier robotic platforms and may improve procedural safety during complex interventions.
The substantial reduction in operator radiation exposure is particularly noteworthy. As procedure complexity continues to increase, technologies that reduce cumulative radiation exposure and the physical burden associated with lead protection could have important implications for operator health and career longevity.
Beyond radiation protection, fully teleoperated intervention raises the possibility of providing expert endovascular care to remote or underserved regions. In the future, such systems could facilitate time-sensitive interventions when local expertise is unavailable.
However, enthusiasm should be tempered by the limitations of the present study, including the very small sample size, single-center design, and absence of a comparator arm. Larger multicenter studies will be necessary to establish clinical benefit, cost-effectiveness, procedural reproducibility, and applicability to more complex interventions.